微观智能的边界突破:揭秘无需大脑的自主移动技术
在微米级机器人的研发领域,长期以来存在着一个核心瓶颈:如何在极小的空间内实现复杂的自主运动,同时避免对外部控制系统的过度依赖。荷兰莱顿大学的研究团队,通过一种创新的3D打印技术,成功构建出尺寸在0.5至5微米之间的柔性微型机器人,彻底改变了这一技术图景。这些设备不仅突破了制造精度的极限,更通过独特的物理结构设计,实现了在无大脑、无传感器、无马达状态下的自主推进,这一成果为微米机器人学树立了新的技术标杆。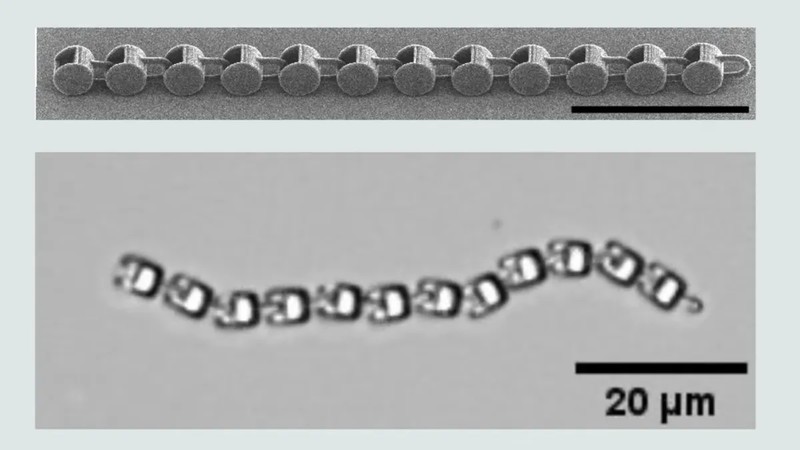
结构决定功能的运动机制分析
该项技术的核心优势在于其对“形态与运动反馈”的深度利用。不同于传统机器人依赖电子信号驱动,这些微型机器人通过电场激发,利用其链状结构的柔韧性,在移动过程中实时调整自身姿态。这种机制本质上是一种基于物理学的反馈循环:机器人的每一次位移都会改变其形态,而形态的改变又直接决定了下一次的移动路径。这种无序中的有序,正是通过对材料力学与流体动力学的精准计算,将复杂的控制逻辑固化在物理结构中,从而极大简化了系统设计的复杂性。
关键技术要素与性能指标
为了达到每秒7微米的移动速度,研究团队在3D打印精度与材料柔性之间找到了微妙的平衡点。其核心要素包括:首先,高精度的微细加工能力,确保了链状结构在微观尺度下的几何参数精确可控;其次,材料的各向异性设计,使其在电场力作用下能够产生特定的形变模式,从而模拟出蠕虫或蛇类的推进方式;最后,对环境交互的适应性,机器人能够感知流体介质的阻力,并据此调整摆动频率。这种设计不仅提升了运动效率,更为后续在复杂生物环境中的应用提供了技术保障。
从实验室走向临床的经验萃取
虽然目前该技术仍处于实验室阶段,但其展示出的潜力已指向明确的临床应用方向。要实现从研究到临床的跨越,必须解决以下技术挑战:首先,需进一步优化其在生物体液环境下的稳定性,防止因表面吸附导致的运动受阻;其次,需建立完善的体外驱动与实时监测体系,虽然机器人自主移动,但仍需精准的电场引导以确保靶向精度;最后,探索生物可降解材料的应用,以实现微创手术后的完全吸收。这些实践建议不仅是针对该特定项目的,也是未来所有微型医疗机器人研发必须遵循的工程路径。
微观机器人动力学设计的进阶思考
深入分析该类机器人的运动动力学,可以发现其在低雷诺数环境下的卓越表现。在微观尺度下,惯性力微乎其微,粘性力占据主导地位,这意味着任何微小的形状改变都会对流体产生显著的扰动。研究人员通过精巧的链状结构设计,巧妙地利用这种扰动来实现推进。这种设计范式为我们提供了宝贵的工程启示:在微米尺度,与其追求复杂的算法控制,不如专注于几何形态的优化。通过建立形态-运动的映射库,我们可以根据不同的任务需求,设计出具有特定轨迹和速度特性的微型机器人,从而在药物输送、细胞操作等领域实现更高效的自动化作业。

